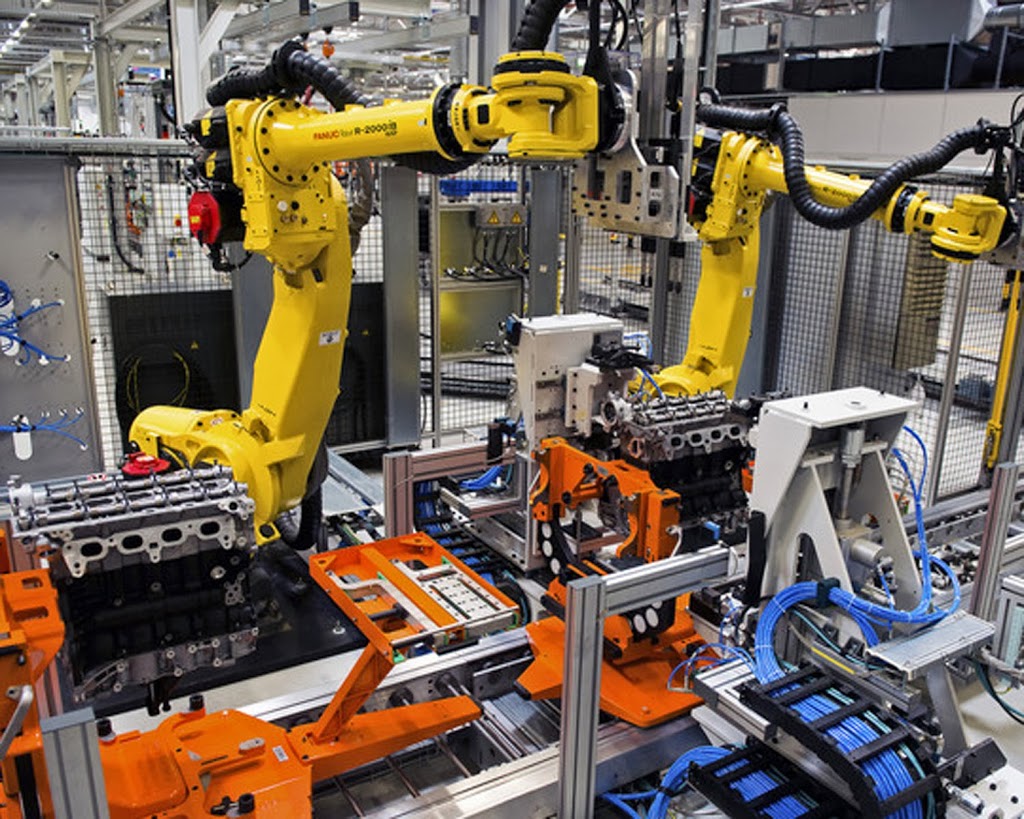
How Does Pneumatic Air Cylinder Actuators Work?
How Does Pneumatic Cylinder Actuators work? i.e.: Grippers, Linear Actuators and Rotary Actuators, they convert energy (compressed air or pressurized oil) into linear or rotary motion. Types of pneumatic actuators include:
- Pneumatic Gripper
- Rotary Actuators
- Linear Actuators
- Robotic Tool Changers
- Robotic Load Limiter
- Multi Motion Actuators
- O-ring Automated Assembly
- Feed Escapements
A pneumatic actuator consists of a piston, a cylinder, and ports. The piston is surrounded by seal, which keeps the air separate from the upper and lower part of the cylinder, allowing air pressure to force the piston in either direction generating motion. Pneumatic double acting cylinders require a four way two position valve to operate them. Combining these actuators can yield an efficient robotic pick and place system for lean manufacturing.
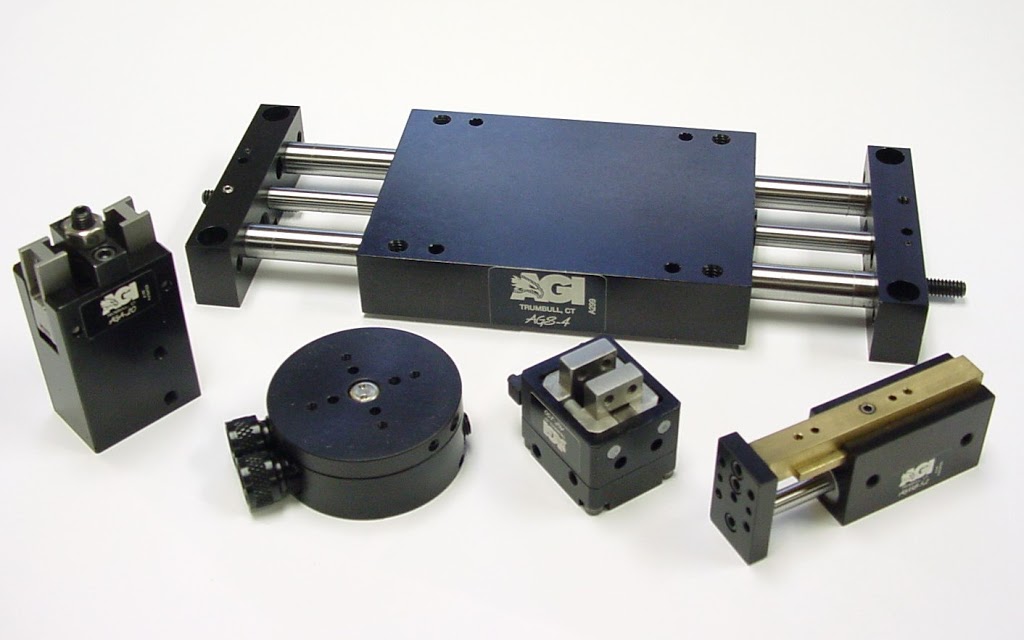
Pneumatic gripper mechanism has three major styles, parallel gripper, angular gripper design, and custom units such as o-ring assembly unit. Gripper is used to hold or clamp a part much like a human hand. They are typically used between a pick and place or a robot and the part being handled. Grippers have wide range of sizes jaw and gripping forces for most any industrial application. Robotic grippers range from miniature series to units that have 1500 lbs. of gripping force.
Rotary Actuator Rack and Pinion type with flange output has many advances to improve productivity. Pneumatic low profile compact rotary actuators are ideal for payloads from 1 lb (.44Kg) to 30 lbs (13.6Kg). The standard rotations available are 45, 90, or 180 degrees. Built in adjustable hard stops on output flange prevent pinion breakage. AGR units have zero back-lash due to the cross ported drive pistons never bottoming out; this also achieves true force throughout the rotation and end of stroke.
Linear Actuators Slides has three styles, base slides, magnetically coupled rodless slides, thrusters and pneumatic actuators. The units provide smooth linear motion due to the precision ball bearings riding on hardened ground shafts. The pneumatic linear actuators are internally powered by an air cylinder. Miniature Linear Actuators are also available where space is limited. Rodless Linear Actuators or Guided rodless air cylinders are different from standard air cylinders, no piston rod will extends past the cylinder body. The internal piston is connected to the carriage magnetically, pulling the outer carriage along with the piston, this is ideal for long stroke applications.
Feed Escapements actuator is ideal for singulating and release of individual parts from hoppers, conveyors, vibratory feeder bowls, tracks and magazines. These compact long stroke Linear actuators escapements are internally sequenced.
Robotic Tool Changers or End Of Arm tooling provides the flexibility to automatically change end-effectors or other peripherals. Robotic tool changer has two mating halves, one called Robot Side and the other Tool Side. They couple locked together via a pneumatic air cylinder and have user electrical contacts, pneumatic, water pass through. This makes a robot very versatile for high production environment. Robotic load limiters prevent damage to E.O.A.T and other robotic peripherals.
Automation of o-ring assembly requires many parts to work as a whole seen in this video. Typically a vibratory bowl will separate the o-rings, feed them down a track into a dead nest for the o-ring gripper to pick and place the seal on the parts.